It’s been while since I posted. I have been distracted by other things. However time for an update: I had the robot balancing very well, left it for a few days then found it had issues, it probably had something to do with dodgy DuPont wiring. I had every intention of troubleshooting it but it was forgotten about in the back of a cupboard for many months.
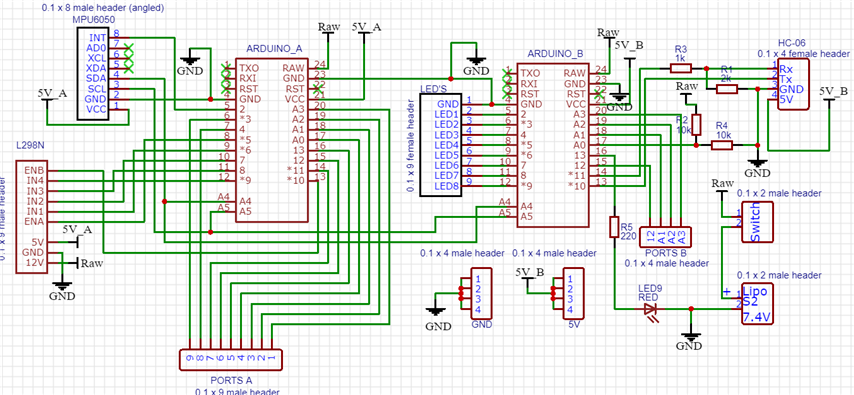
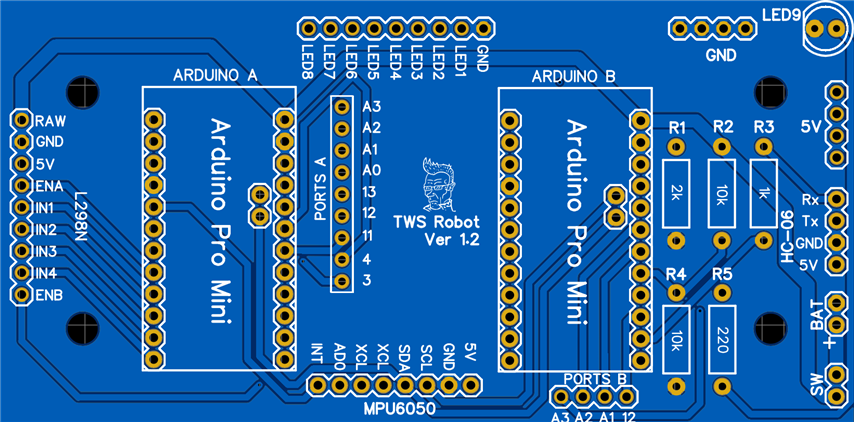
Having finally got back to it, I decide to get a proper PCB made to help with the reliability. The PCB would have headers to plug in two Arduino Pro Minis and contain the passive components and headers for the external modules and motor driver. I also pulled out the unused ports from the main Arduino to a header to allow for future development. I added extra ground and 5V headers for the same reason. The schematic and PCB were designed using EasyEDA and the PCB is being made by JPLPCB.
This is the Schematic:
Here is the PCB:
The board has been made and is in transit. It can take the best part of three weeks to come from China. It cost me £1.62 for five boards and got free shipping on first order. Normally shipping would only cost £4.30! an absolute bargain as long as your not in to much of a hurry. You can get it in a few days but it costs a lot more. When it arrives I will continue this journey and keep you updated.