I decided to revisit the balancing robot project and re-design the PCB to incorporate potentiometers to allow manual adjustment of the PID. Having pots for Kd, Kp and Ki should make tuning the balance a lot easier. On the old version these values were hard coded in the program so every change meant that the Arduino had to be re-programmed making it very tedious. I also added extra connection points for 5 volts, SDA and SCL for possible future expansion.
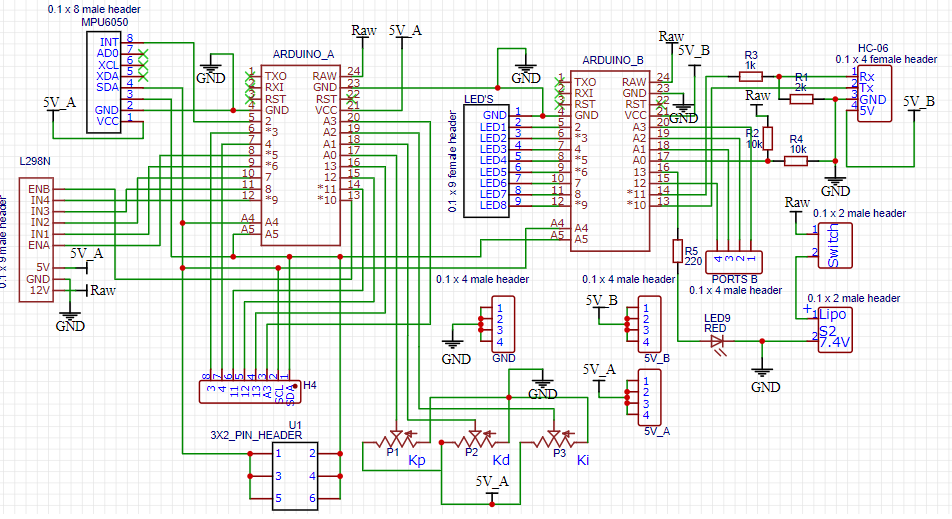
Schematic
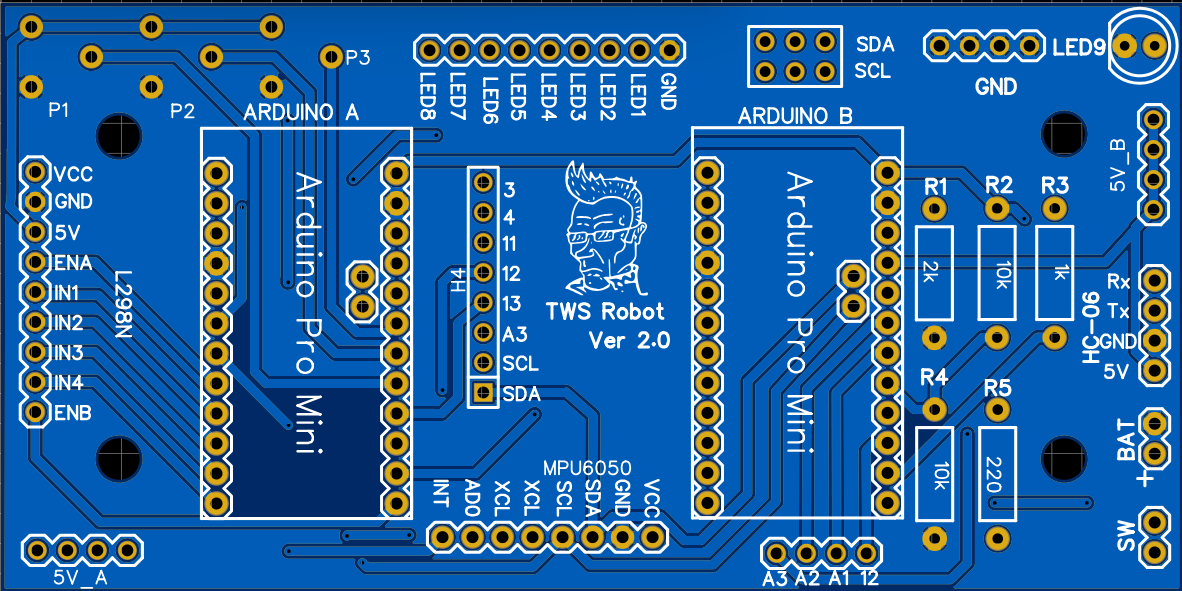
PCB