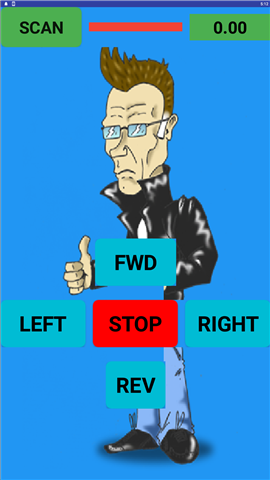
Another thing I have been doing is learning to create android apps, This turned to be fairly straight forward using an online application called thunkable. I have created two apps to control the robot over Bluetooth, one for classic Bluetooth and one for Bluetooth Low Energy. Both of these apps send a direction or stop variable back to the robot and receives and displays the current battery voltage with a battery low indicator displayed.