Re-designed the robot around Raspberry Pi Pico. Purely an academic exercise at this stage.
Re-designed the robot around Raspberry Pi Pico. Purely an academic exercise at this stage.
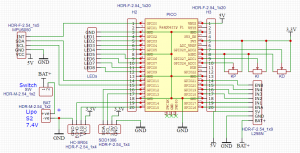
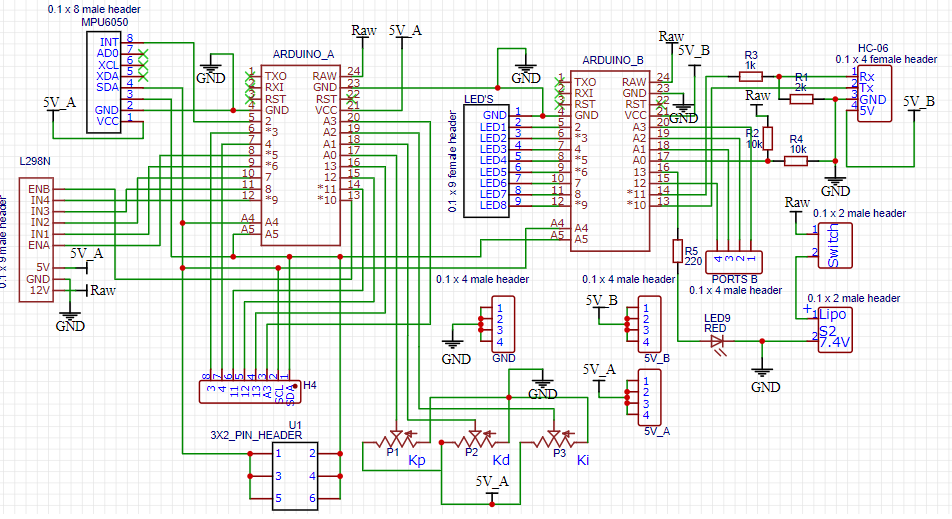
I decided to revisit the balancing robot project and re-design the PCB to incorporate potentiometers to allow manual adjustment of the PID. Having pots for Kd, Kp and Ki should make tuning the balance a lot easier. On the old version these values were hard coded in the program so every change meant that the Arduino had to be re-programmed making it very tedious. I also added extra connection points for 5 volts, SDA and SCL for possible future expansion.
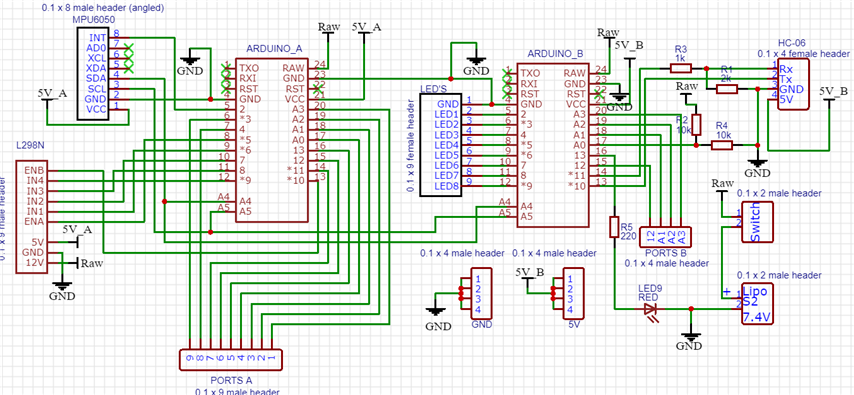
Schematic
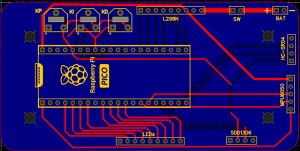
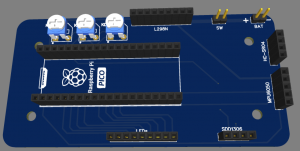
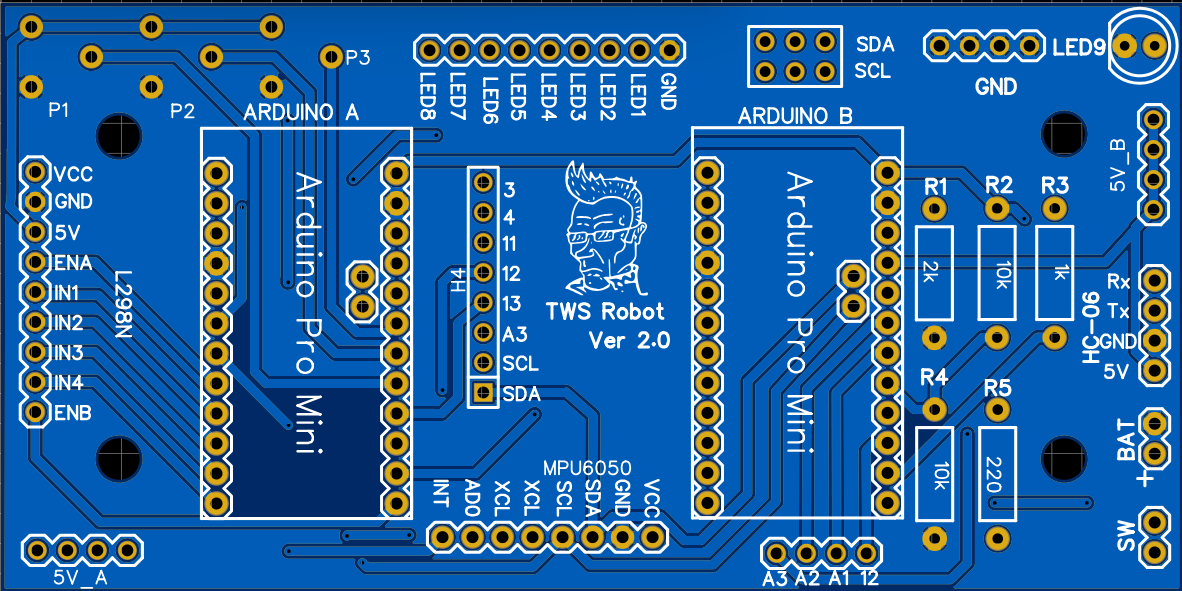
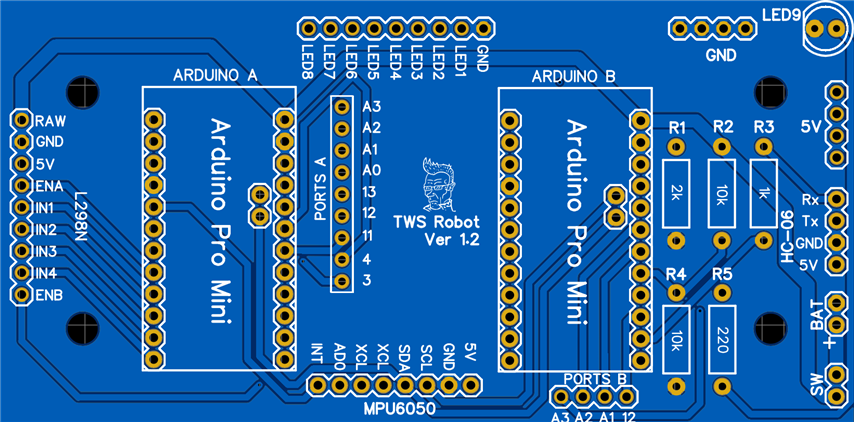
PCB
I am looking to replace the outside light at the side of the my house. Currently it is a halogen floodlight with PIR fitted to the front of my garage. As is often the case, water has got into the PIR and destroyed it. I remember reading about cheap doppler RADAR modules that can detect movement through walls and wondered if I could use one of these inside the garage to operate like the PIR floodlight did but keep it in the dry.. I would also like to update to a LED light.
The RADAR modules are the RCWL-0516 available from Amazon UK for £4.99 for 6 there is no need to use a microcontroller as these can be configured without one, however I am planning to use one as configuring the modules require the soldering of small passive smd caps and resistors which I am finding more and more difficult these days. I won’t require many GPIO pins, so I will probably use an Attiny85 or similar MCU. I will also need a relay or relay module. Time to get the breadboard out again….
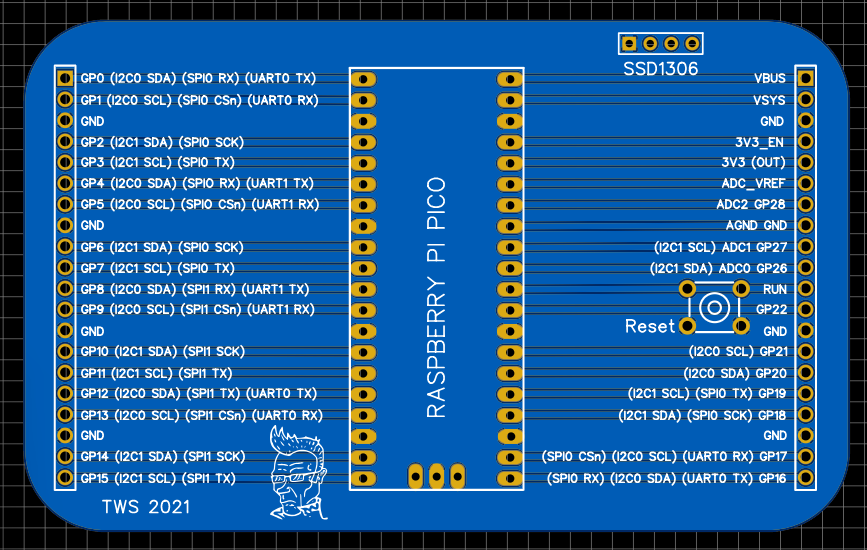
Just designed and ordered a breakout board for a raspberry pi pico. I have included a reset button and an option to plug in a small OLED.
I have now moved this website online. I did this for a few reasons. First I wanted to free up the Pi 4 for another project and I always had to spend time checking the site for attempted attacks (I could get dozens every day). The security on it was very good and nothing ever got through but you can’t guard against every vulnerability. Another reason was that my DNS nameservers were not all in one place. My email mx records were with one company and redirected while the rest of my DNS records were with Ionos (1&1) so i wanted to consolidate everything. The site was migrated to Ionos where my emails are now also setup.
I haven’t posted much recently as I have started a new job. Hopefully in the next few weeks I will remedy this.
I have just moved the website from a Pi zero to a Pi 4. Took most of a whole Sunday to do it. The Pi zero was becoming slow and WordPress was complaining about an insecure version of PHP. I will also look at running it off a SSD for reliability and speed. I will add instructions for this in due course.
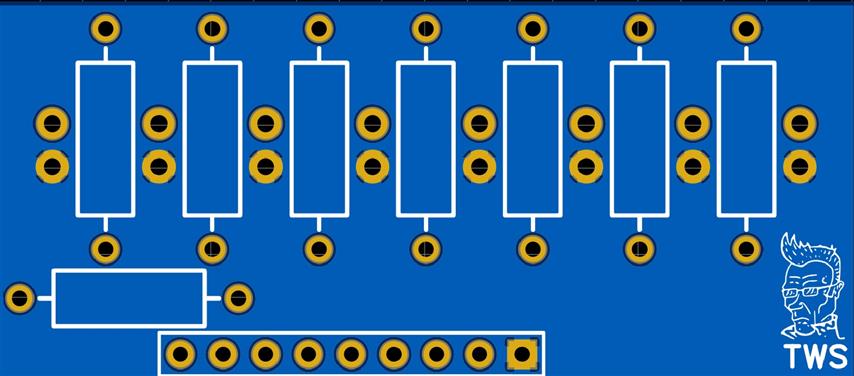
Got a LED PCB made as well for knightrider scan.
It’s been while since I posted. I have been distracted by other things. However time for an update: I had the robot balancing very well, left it for a few days then found it had issues, it probably had something to do with dodgy DuPont wiring. I had every intention of troubleshooting it but it was forgotten about in the back of a cupboard for many months.
Having finally got back to it, I decide to get a proper PCB made to help with the reliability. The PCB would have headers to plug in two Arduino Pro Minis and contain the passive components and headers for the external modules and motor driver. I also pulled out the unused ports from the main Arduino to a header to allow for future development. I added extra ground and 5V headers for the same reason. The schematic and PCB were designed using EasyEDA and the PCB is being made by JPLPCB.
This is the Schematic:
Here is the PCB:
The board has been made and is in transit. It can take the best part of three weeks to come from China. It cost me £1.62 for five boards and got free shipping on first order. Normally shipping would only cost £4.30! an absolute bargain as long as your not in to much of a hurry. You can get it in a few days but it costs a lot more. When it arrives I will continue this journey and keep you updated.
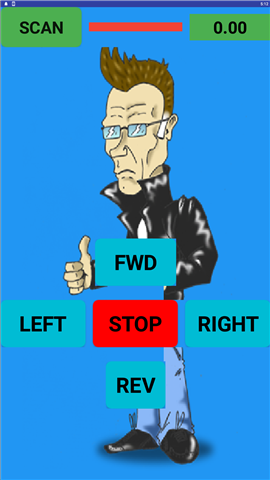
Another thing I have been doing is learning to create android apps, This turned to be fairly straight forward using an online application called thunkable. I have created two apps to control the robot over Bluetooth, one for classic Bluetooth and one for Bluetooth Low Energy. Both of these apps send a direction or stop variable back to the robot and receives and displays the current battery voltage with a battery low indicator displayed.