Due to back pain I have not been doing very much to this project lately. But what I have done is complete a knight rider scanner LED circuit running on 168 Arduino nano. The code for this was cribbed from the internet.
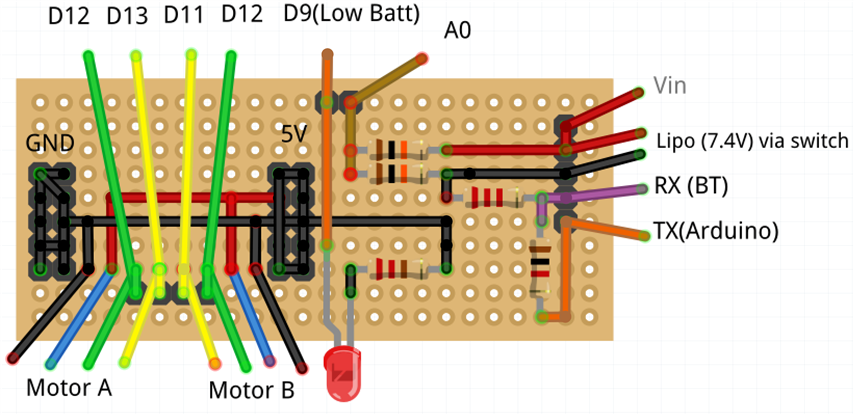
I also created a perfboard PCB to simplify connections so each of the boards can be simply plugged in. This will make the whole thing a lot more modular.